The Visual Navigation Drone is a device that can recognize object targets and autonomously move towards
them. One of the core goals of this project were to create a system that would be able to recognize specific targets
and identify them. This would be done by creating an artificial intelligence algorithm that could take a camera
input and recognize images with at least an 80% accuracy. Also, the drone should be able to hover and move in all
three dimensions toward a selected target. Furthermore, the drone should protect itself by being able to sense
objects in the environment at least 0.3 m away and stop to avoid collision.
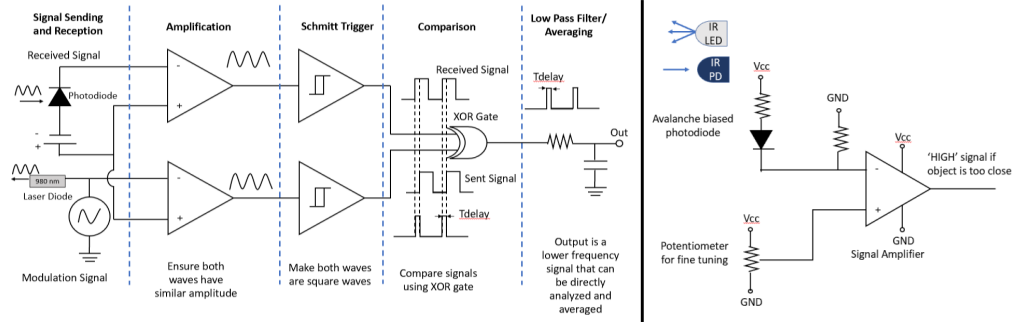
The optics use an infrared pulsed laser diode at 980 nm as well as a series of four infrared LEDs to sense
objects around the drone. The signal is sent out into the environment and is sent back toward the photodiode. This
data is then transferred to the circuit board. Since measuring the distance using a digital method is rather resource
intensive, the circuit analyzes the data using analog electronics before outputting a low frequency signal. This
system, both the drone and the proximity scanners, is meant to be significantly cheaper than any commercial
alternatives. Even lower end consumer grade drones can be thousands of dollars, and distance scanners adding
onto that cost even more so. The group believes that they have successfully created a more affordable alternative,
saving hundreds of dollars.
Having an autonomous flying drone that can be programmed to detect objects is an incredible tool. This
technology could see a wide variety of applications in commercial, industrial, and defensive applications. A drone
with a more sophisticated object detection could detect wildfires, search for missing persons, detect safe paths for
military vehicles, and more.
Sponsor: UCF ECE Department