The Pawsitive Pet Feeder is a new type of pet feeder that uses both optics and electronics to automatically feed the user’s
pets. This project upgrades from the regular pet feeder by adding optical components that allow the system to identify the
different pets (Pet A, Pet B, Pet C) and to self-open and self-close the lid of each bowl by the camera color detection and
the IR proximity sensor. This system works due to the addition of the collar tag, RGB LED lights, and the camera system
that will be attached to the pet feeder will be able to detect the pets.
The main goals of the project are the color detection of the camera from the LEDs, self-opening and self-closing lid when the pet arrives or leaves the feeder, and phone application to control the feeder remotely. The objectives are, to create a camera system that recognizes RGB colors from LED collar tags to open an assigned bowl and lid system, to create an IR proximity sensor with IR LEDs, photodiodes, and processor to detect when the pet leaves the bowl to close the lid, and to create the phone application that will connect to the feeder through Wi-Fi.
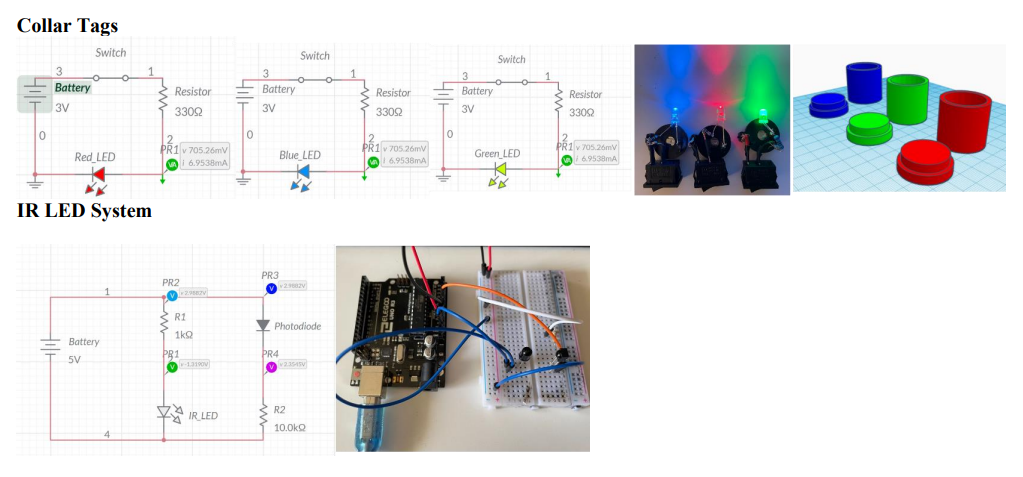
In Zemax, I did the optical design of our Fresnel lens located in the collar tag to meet project performance requirements (increase detection range to 2 ft) and constrains (1 inch diameter as this is the diameter of the 3V battery we are using to power the LEDs). Also, I made the circuits of the collar tag that included the LEDs, the circuit of IR proximity sensor, the color detection code for the Raspberry Pi camera, and the code of the IR Proximity sensor in the processor.
The main goals of the project are the color detection of the camera from the LEDs, self-opening and self-closing lid when the pet arrives or leaves the feeder, and phone application to control the feeder remotely. The objectives are, to create a camera system that recognizes RGB colors from LED collar tags to open an assigned bowl and lid system, to create an IR proximity sensor with IR LEDs, photodiodes, and processor to detect when the pet leaves the bowl to close the lid, and to create the phone application that will connect to the feeder through Wi-Fi.
In Zemax, I did the optical design of our Fresnel lens located in the collar tag to meet project performance requirements (increase detection range to 2 ft) and constrains (1 inch diameter as this is the diameter of the 3V battery we are using to power the LEDs). Also, I made the circuits of the collar tag that included the LEDs, the circuit of IR proximity sensor, the color detection code for the Raspberry Pi camera, and the code of the IR Proximity sensor in the processor.